gxfdg
авпп
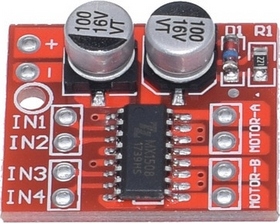
Рис. 1.
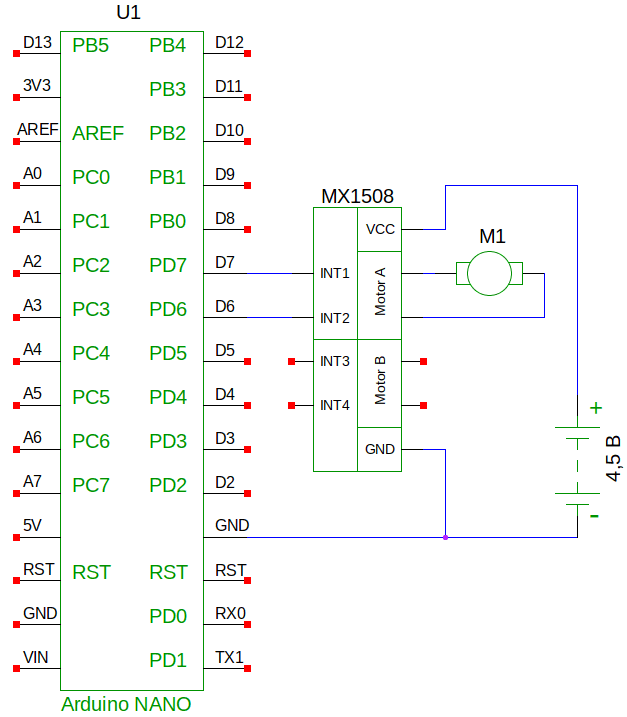
Рис. 2.
int ldp = 7; // Left direction pin
int lsp = 6; // Left speed pin
void setup() {
pinMode(ldp, OUTPUT);
pinMode(lsp, OUTPUT);
delay(1000);
}
void loop() {
digitalWrite(ldp, HIGH);
digitalWrite(lsp, LOW);
}Прог. 1.
| № | INT2 (lsp) | INT1 (ldp) | MOTOR-A |
|---|---|---|---|
| 1 | 0 | 0 | 0 |
| 2 | 0 | 1 | LEFT |
| 3 | 1 | 0 | RIGHT |
| 4 | 1 | 1 | STOP |
Табл. 1.
int ldp = 7; // Left direction pin
int lsp = 6; // Left speed pin
void setup() {
pinMode(ldp, OUTPUT);
delay(1000);
}
void loop() {
digitalWrite(ldp, LOW);
analogWrite(lsp, 100);
}Прог. 2.
int ldp = 7; // Left direction pin
int lsp = 6; // Left speed pin
void setup() {
pinMode(ldp, OUTPUT);
delay(1000);
}
void loop() {
digitalWrite(ldp, HIGH);
analogWrite(lsp, 150);
}Прог. 3.
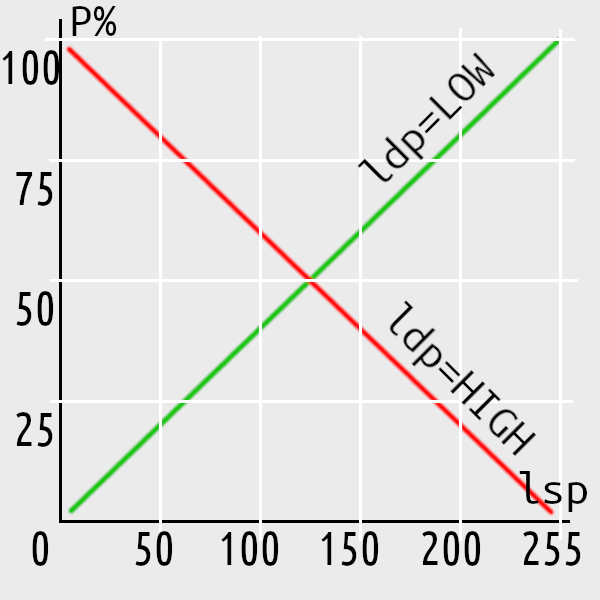
График 1.
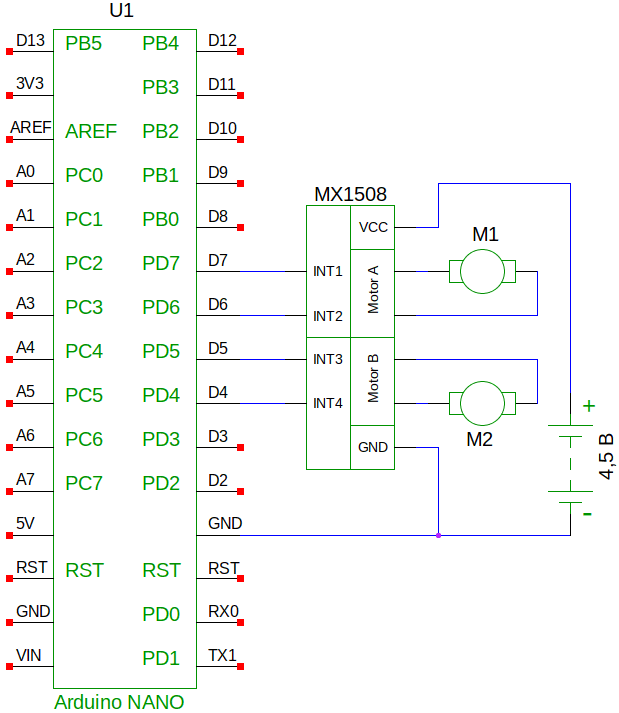
Рис. 3.
Функции пользователя
Пп
Прог. 2.
Задание 1. Напишите функции поворот направо, налево разворот на месте и вокруг колеса, движение назад.
Задание 2. Напишите программы движения робота по тректории овал, прямоугольник, восьмёрка.