Среда программирования Arduino IDE позволяет в программу на языке C++ вставлять фрагменты кода на языке AVR Assemler.
Эта статья для начинающих программировать в среде Ардуино. Здесь мы приведём программу Blink из стандартных примеров Arduino IDE и перепишем её на языке AVR Assembler в среде Arduino IDE.
На многих Ардуино совместимых платах, в том числе и на плате Arduino UNO или Arduino NANO, присутствует светодиод, который можно использовать для тестирования работоспособности платы.
void setup() {
pinMode(LED_BUILTIN, OUTPUT);
}
void loop() {
digitalWrite(LED_BUILTIN, LOW);
delay(450);
digitalWrite(LED_BUILTIN, HIGH);
delay(50);
}Скетч использует 932 байт (2%) памяти устройства. Всего доступно 32256 байт. Глобальные переменные используют 9 байт (0%) динамической памяти, оставляя 2039 байт для локальных переменных. Максимум: 2048 байт.
Пример 1. Программа мигающая светодиодом на плате Arduino UNO или Arduino NANO.
В программе из примера 1 есть ключевое слово, несколько функций (команд) и несколько констант.
| Слово | Единица | Описание |
|---|---|---|
| void | ключевое слово | Определяет тип следующего за ним объекта как не возвращающий значения |
| setup() | функция | Обязательно должна присутствовать в Ардуино программе. |
| loop() | функция | Обязательно должна присутствовать в Ардуино программе. Организует бесконечный цикл. |
| pinMode() | функция | Настраивает функционирование определённой ножки (pin) микроконтроллера. |
| digitalWrite() | функция | Включает определённый логический уровень на ножке (pin), если эта ножка настроена как выход. |
| delay() | функция | Останавливает выполнение программы на заданное время |
| LED_BUILTIN | константа | Значение для Arduino UNO 13 |
| OUTPUT | константа | true или 1 |
| LOW | константа | false или 0 |
| HIGH | константа | true или 1 |
Рассмотрим часть принципиальной электрической схемы платы Arduino.
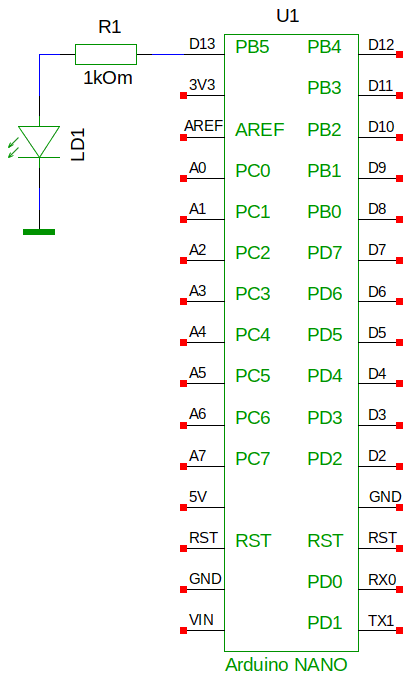
Рис. 1. Светодиод на плате Ардуино подключён к выводу D13.
На рис. 1 мы видим, что порт PB5 микроконтроллера ATMega328 соединён с выводом D13 платы Ардуино. Когда на выводе D13 установлен логический 0, светодиод LD1 не горит. Когда - логическая 1 (~4,5 Вольт), ток идёт из микроконтроллера вывод D13 платы Ардуино через резистор R1, светодиод LD1 на общий провод с потенциалом 0 Вольт. Светодиод горит.
В программе из примера 1 в функции setup() функция pinMode(LED_BUILTIN, OUTPUT) настраивает вывод D13 платы Ардуино как выход. LED_BUILTIN=13.
В функции loop() функция digitalWrite(LED_BUILTIN, LOW) устанавливает на выводе D13 логический 0. Светодиод LD1 не горит. Функция digitalWrite(LED_BUILTIN, HIGH) устанавливает на выводе D13 логическую 1. Светодиод LD1 горит.
Микроконтроллер ATMega328 установленный на плате Ардуино работает очень быстро. Он выполняет 1 ассемблерную команду за 1 такт тактового генератора. Тактовая частота микроконтроллера ATMega328 на плате Ардуино 16 МГц. Значит период 1 такта 0,0000000625 сек (1/16000000). Именно за это время выполняется каждая ассемблерная команда. Если с такой скоростью переключать светодиод мы мерцаний не заметим. Поэтому в программе пример 1 добавлены функции delay(), которые выполняют задержку. После включения светодиода задержка выполнения программы 450 миллисекунд., а после включения 50 миллисекунд.
Подытожим в функции loop(), в цикле, то есть непрерывно повторяясь, светодиод LD1 выключен 450 миллисекунд и включается на 50 миллисекунд.
Перепишем программу из примера 1 учитывая значения констант и тот факт, что электрические сигналы на ножках микроконтроллера ATMega328 зависят от значений записанных в 8-ми битные управляющие регистры микроконтроллера. Уровень сигнала на порту PB5 зависит от состояния 5-го бита в регистре PORTB, а настройка порта PB5 как вход или выход зависит от состояния 5-го бита в регистре DDRB.
void setup() {
DDRB = 0b00100000;
}
void loop() {
PORTB = 0b00000000;
delay(450);
PORTB = 0b00100000;
delay(50);
}Скетч использует 654 байт (2%) памяти устройства. Всего доступно 32256 байт. Глобальные переменные используют 9 байт (0%) динамической памяти, оставляя 2039 байт для локальных переменных. Максимум: 2048 байт.
Пример 2. Программа мигающая светодиодом на плате Arduino UNO или Arduino NANO.
Программы из примера 1 и примера 2 не тождественны, но работают одинаково.
Заменим в программе из примера 2 операторы присваивания (=) ассемблерными вставками.
void setup() {
asm volatile
(
"ldi R16, 0b00100000 \n"
"out 0x04, R16 \n"
);
}
void loop() {
asm volatile
(
"ldi R16, 0b00000000 \n"
"out 0x05, R16 \n"
);
delay(450);
asm volatile
(
"ldi R16, 0b00100000 \n"
"out 0x05, R16 \n"
);
delay(50);
}Скетч использует 654 байт (2%) памяти устройства. Всего доступно 32256 байт. Глобальные переменные используют 9 байт (0%) динамической памяти, оставляя 2039 байт для локальных переменных. Максимум: 2048 байт.
Пример 3. Программа мигающая светодиодом на плате Arduino UNO или Arduino NANO с ассемблерными вставками.
В примере 3 вы видите 3 ассемблерные вставки. Все они практически одинаковые и состоят из 2 строк кода на AVR Assembler. команда LDI загружает в регистр общего назначения восьми-битное число. Команда OUT копирует значение из регистра общего назначения (РОН) в регистр (РВВ). К сожалению, указать в команде OUT имя регистра ввода вывода DDRB или PORTB в среде разработки Arduino нельзя. Мы взяли адреса этих регистров в памяти микроконтроллера из файла m328Pdef.inc. Файл m328Pdef.inc приведён в конце статьи.
Как видите, ассемблерные вставки в скетче Ардуино не являются удобным инструментом. Мне кажется более удобно хранить программу в 2-х файлах, отдельно Си-код и отдельно код на Ассемблере. Причем, если файл с программой на Ассемблере имеет расширение "S", и хранится в той же папке что и файл с программой на Си с расширением ino, то оба файла при компиляции объединяются в одну программу автоматически. Arduino IDE открывает оба файла на редактирование.
.global D13OUT
.global D13OFF
.global D13ON
.equ DDRB, 0x04
.equ PORTB, 0x05
D13OUT:
ldi R16, 0b00100000
out DDRB, R16
ret
D13OFF:
ldi R16, 0b00000000
out PORTB, R16
ret
D13ON:
ldi R16, 0b00100000
out PORTB, R16
retФайл с расширением "S".
extern "C" {
extern __FlashStringHelper *D13OUT(void);
extern __FlashStringHelper *D13OFF(void);
extern __FlashStringHelper *D13ON(void);
}
void setup() {
D13OUT();
}
void loop() {
D13OFF();
delay(450);
D13ON();
delay(50);
}Файл с расширением "ino".
Скетч использует 672 байт (2%) памяти устройства. Всего доступно 32256 байт.
Глобальные переменные используют 9 байт (0%) динамической памяти, оставляя 2039 байт для локальных переменных. Максимум: 2048 байт.
Пример 4. Программа мигающая светодиодом на плате Arduino UNO или Arduino NANO с функциями на ассемблере.
В программе из примера 4 на ассемблере написано 3 функции, а в коде на C++ эти функции подключаются как внешние (extern) и затем используются самым обычным образом.
Перепишем программу из примера 4 с передачей параметра.
.global D13OnOff
.equ DDRB, 0x04
.equ PORTB, 0x05
D13OnOff:
ldi R16, 0b00100000
out DDRB, R16
out PORTB, R24
retФайл с расширением "S".
extern "C" {
extern __FlashStringHelper *D13OnOff(byte);
}
void setup() {
}
void loop() {
D13OnOff(0b00000000);
delay(450);
D13OnOff(0b00100000);
delay(50);
}Файл с расширением "ino".
Скетч использует 662 байт (2%) памяти устройства. Всего доступно 32256 байт.
Глобальные переменные используют 9 байт (0%) динамической памяти, оставляя 2039 байт для локальных переменных. Максимум: 2048 байт.
Пример 5. Программа мигающая светодиодом на плате Arduino UNO или Arduino NANO с функцией на ассемблере.
;***** THIS IS A MACHINE GENERATED FILE - DO NOT EDIT ********************
;***** Created: 2011-02-09 12:03 ******* Source: ATmega328P.xml **********
;*************************************************************************
;* A P P L I C A T I O N N O T E F O R T H E A V R F A M I L Y
;*
;* Number : AVR000
;* File Name : "m328Pdef.inc"
;* Title : Register/Bit Definitions for the ATmega328P
;* Date : 2011-02-09
;* Version : 2.35
;* Support E-mail : avr @ atmel.com
;* Target MCU : ATmega328P
;*
;* DESCRIPTION
;* When including this file in the assembly program file, all I/O register
;* names and I/O register bit names appearing in the data book can be used.
;* In addition, the six registers forming the three data pointers X, Y and
;* Z have been assigned names XL - ZH. Highest RAM address for Internal
;* SRAM is also defined
;*
;* The Register names are represented by their hexadecimal address.
;*
;* The Register Bit names are represented by their bit number (0-7).
;*
;* Please observe the difference in using the bit names with instructions
;* such as "sbr"/"cbr" (set/clear bit in register) and "sbrs"/"sbrc"
;* (skip if bit in register set/cleared). The following example illustrates
;* this:
;*
;* in r16,PORTB ;read PORTB latch
;* sbr r16,(1<<PB6)+(1<<PB5) ;set PB6 and PB5 (use masks, not bit#)
;* out PORTB,r16 ;output to PORTB
;*
;* in r16,TIFR ;read the Timer Interrupt Flag Register
;* sbrc r16,TOV0 ;test the overflow flag (use bit#)
;* rjmp TOV0_is_set ;jump if set
;* ... ;otherwise do something else
;*************************************************************************
#ifndef _M328PDEF_INC_
#define _M328PDEF_INC_
#pragma partinc 0
; ***** SPECIFY DEVICE ***************************************************
.device ATmega328P
#pragma AVRPART ADMIN PART_NAME ATmega328P
.equ SIGNATURE_000 = 0x1e
.equ SIGNATURE_001 = 0x95
.equ SIGNATURE_002 = 0x0f
#pragma AVRPART CORE CORE_VERSION V2E
; ***** I/O REGISTER DEFINITIONS *****************************************
; NOTE:
; Definitions marked "MEMORY MAPPED"are extended I/O ports
; and cannot be used with IN/OUT instructions
.equ UDR0 = 0xc6 ; MEMORY MAPPED
.equ UBRR0L = 0xc4 ; MEMORY MAPPED
.equ UBRR0H = 0xc5 ; MEMORY MAPPED
.equ UCSR0C = 0xc2 ; MEMORY MAPPED
.equ UCSR0B = 0xc1 ; MEMORY MAPPED
.equ UCSR0A = 0xc0 ; MEMORY MAPPED
.equ TWAMR = 0xbd ; MEMORY MAPPED
.equ TWCR = 0xbc ; MEMORY MAPPED
.equ TWDR = 0xbb ; MEMORY MAPPED
.equ TWAR = 0xba ; MEMORY MAPPED
.equ TWSR = 0xb9 ; MEMORY MAPPED
.equ TWBR = 0xb8 ; MEMORY MAPPED
.equ ASSR = 0xb6 ; MEMORY MAPPED
.equ OCR2B = 0xb4 ; MEMORY MAPPED
.equ OCR2A = 0xb3 ; MEMORY MAPPED
.equ TCNT2 = 0xb2 ; MEMORY MAPPED
.equ TCCR2B = 0xb1 ; MEMORY MAPPED
.equ TCCR2A = 0xb0 ; MEMORY MAPPED
.equ OCR1BL = 0x8a ; MEMORY MAPPED
.equ OCR1BH = 0x8b ; MEMORY MAPPED
.equ OCR1AL = 0x88 ; MEMORY MAPPED
.equ OCR1AH = 0x89 ; MEMORY MAPPED
.equ ICR1L = 0x86 ; MEMORY MAPPED
.equ ICR1H = 0x87 ; MEMORY MAPPED
.equ TCNT1L = 0x84 ; MEMORY MAPPED
.equ TCNT1H = 0x85 ; MEMORY MAPPED
.equ TCCR1C = 0x82 ; MEMORY MAPPED
.equ TCCR1B = 0x81 ; MEMORY MAPPED
.equ TCCR1A = 0x80 ; MEMORY MAPPED
.equ DIDR1 = 0x7f ; MEMORY MAPPED
.equ DIDR0 = 0x7e ; MEMORY MAPPED
.equ ADMUX = 0x7c ; MEMORY MAPPED
.equ ADCSRB = 0x7b ; MEMORY MAPPED
.equ ADCSRA = 0x7a ; MEMORY MAPPED
.equ ADCH = 0x79 ; MEMORY MAPPED
.equ ADCL = 0x78 ; MEMORY MAPPED
.equ TIMSK2 = 0x70 ; MEMORY MAPPED
.equ TIMSK1 = 0x6f ; MEMORY MAPPED
.equ TIMSK0 = 0x6e ; MEMORY MAPPED
.equ PCMSK1 = 0x6c ; MEMORY MAPPED
.equ PCMSK2 = 0x6d ; MEMORY MAPPED
.equ PCMSK0 = 0x6b ; MEMORY MAPPED
.equ EICRA = 0x69 ; MEMORY MAPPED
.equ PCICR = 0x68 ; MEMORY MAPPED
.equ OSCCAL = 0x66 ; MEMORY MAPPED
.equ PRR = 0x64 ; MEMORY MAPPED
.equ CLKPR = 0x61 ; MEMORY MAPPED
.equ WDTCSR = 0x60 ; MEMORY MAPPED
.equ SREG = 0x3f
.equ SPL = 0x3d
.equ SPH = 0x3e
.equ SPMCSR = 0x37
.equ MCUCR = 0x35
.equ MCUSR = 0x34
.equ SMCR = 0x33
.equ ACSR = 0x30
.equ SPDR = 0x2e
.equ SPSR = 0x2d
.equ SPCR = 0x2c
.equ GPIOR2 = 0x2b
.equ GPIOR1 = 0x2a
.equ OCR0B = 0x28
.equ OCR0A = 0x27
.equ TCNT0 = 0x26
.equ TCCR0B = 0x25
.equ TCCR0A = 0x24
.equ GTCCR = 0x23
.equ EEARH = 0x22
.equ EEARL = 0x21
.equ EEDR = 0x20
.equ EECR = 0x1f
.equ GPIOR0 = 0x1e
.equ EIMSK = 0x1d
.equ EIFR = 0x1c
.equ PCIFR = 0x1b
.equ TIFR2 = 0x17
.equ TIFR1 = 0x16
.equ TIFR0 = 0x15
.equ PORTD = 0x0b
.equ DDRD = 0x0a
.equ PIND = 0x09
.equ PORTC = 0x08
.equ DDRC = 0x07
.equ PINC = 0x06
.equ PORTB = 0x05
.equ DDRB = 0x04
.equ PINB = 0x03
; ***** BIT DEFINITIONS **************************************************
; ***** USART0 ***********************
; UDR0 - USART I/O Data Register
.equ UDR0_0 = 0 ; USART I/O Data Register bit 0
.equ UDR0_1 = 1 ; USART I/O Data Register bit 1
.equ UDR0_2 = 2 ; USART I/O Data Register bit 2
.equ UDR0_3 = 3 ; USART I/O Data Register bit 3
.equ UDR0_4 = 4 ; USART I/O Data Register bit 4
.equ UDR0_5 = 5 ; USART I/O Data Register bit 5
.equ UDR0_6 = 6 ; USART I/O Data Register bit 6
.equ UDR0_7 = 7 ; USART I/O Data Register bit 7
; UCSR0A - USART Control and Status Register A
.equ MPCM0 = 0 ; Multi-processor Communication Mode
.equ U2X0 = 1 ; Double the USART transmission speed
.equ UPE0 = 2 ; Parity Error
.equ DOR0 = 3 ; Data overRun
.equ FE0 = 4 ; Framing Error
.equ UDRE0 = 5 ; USART Data Register Empty
.equ TXC0 = 6 ; USART Transmitt Complete
.equ RXC0 = 7 ; USART Receive Complete
; UCSR0B - USART Control and Status Register B
.equ TXB80 = 0 ; Transmit Data Bit 8
.equ RXB80 = 1 ; Receive Data Bit 8
.equ UCSZ02 = 2 ; Character Size
.equ TXEN0 = 3 ; Transmitter Enable
.equ RXEN0 = 4 ; Receiver Enable
.equ UDRIE0 = 5 ; USART Data register Empty Interrupt Enable
.equ TXCIE0 = 6 ; TX Complete Interrupt Enable
.equ RXCIE0 = 7 ; RX Complete Interrupt Enable
; UCSR0C - USART Control and Status Register C
.equ UCPOL0 = 0 ; Clock Polarity
.equ UCSZ00 = 1 ; Character Size
.equ UCPHA0 = UCSZ00 ; For compatibility
.equ UCSZ01 = 2 ; Character Size
.equ UDORD0 = UCSZ01 ; For compatibility
.equ USBS0 = 3 ; Stop Bit Select
.equ UPM00 = 4 ; Parity Mode Bit 0
.equ UPM01 = 5 ; Parity Mode Bit 1
.equ UMSEL00 = 6 ; USART Mode Select
.equ UMSEL0 = UMSEL00 ; For compatibility
.equ UMSEL01 = 7 ; USART Mode Select
.equ UMSEL1 = UMSEL01 ; For compatibility
; UBRR0H - USART Baud Rate Register High Byte
.equ UBRR8 = 0 ; USART Baud Rate Register bit 8
.equ UBRR9 = 1 ; USART Baud Rate Register bit 9
.equ UBRR10 = 2 ; USART Baud Rate Register bit 10
.equ UBRR11 = 3 ; USART Baud Rate Register bit 11
; UBRR0L - USART Baud Rate Register Low Byte
.equ _UBRR0 = 0 ; USART Baud Rate Register bit 0
.equ _UBRR1 = 1 ; USART Baud Rate Register bit 1
.equ UBRR2 = 2 ; USART Baud Rate Register bit 2
.equ UBRR3 = 3 ; USART Baud Rate Register bit 3
.equ UBRR4 = 4 ; USART Baud Rate Register bit 4
.equ UBRR5 = 5 ; USART Baud Rate Register bit 5
.equ UBRR6 = 6 ; USART Baud Rate Register bit 6
.equ UBRR7 = 7 ; USART Baud Rate Register bit 7
; ***** TWI **************************
; TWAMR - TWI (Slave) Address Mask Register
.equ TWAM0 = 1 ;
.equ TWAMR0 = TWAM0 ; For compatibility
.equ TWAM1 = 2 ;
.equ TWAMR1 = TWAM1 ; For compatibility
.equ TWAM2 = 3 ;
.equ TWAMR2 = TWAM2 ; For compatibility
.equ TWAM3 = 4 ;
.equ TWAMR3 = TWAM3 ; For compatibility
.equ TWAM4 = 5 ;
.equ TWAMR4 = TWAM4 ; For compatibility
.equ TWAM5 = 6 ;
.equ TWAMR5 = TWAM5 ; For compatibility
.equ TWAM6 = 7 ;
.equ TWAMR6 = TWAM6 ; For compatibility
; TWBR - TWI Bit Rate register
.equ TWBR0 = 0 ;
.equ TWBR1 = 1 ;
.equ TWBR2 = 2 ;
.equ TWBR3 = 3 ;
.equ TWBR4 = 4 ;
.equ TWBR5 = 5 ;
.equ TWBR6 = 6 ;
.equ TWBR7 = 7 ;
; TWCR - TWI Control Register
.equ TWIE = 0 ; TWI Interrupt Enable
.equ TWEN = 2 ; TWI Enable Bit
.equ TWWC = 3 ; TWI Write Collition Flag
.equ TWSTO = 4 ; TWI Stop Condition Bit
.equ TWSTA = 5 ; TWI Start Condition Bit
.equ TWEA = 6 ; TWI Enable Acknowledge Bit
.equ TWINT = 7 ; TWI Interrupt Flag
; TWSR - TWI Status Register
.equ TWPS0 = 0 ; TWI Prescaler
.equ TWPS1 = 1 ; TWI Prescaler
.equ TWS3 = 3 ; TWI Status
.equ TWS4 = 4 ; TWI Status
.equ TWS5 = 5 ; TWI Status
.equ TWS6 = 6 ; TWI Status
.equ TWS7 = 7 ; TWI Status
; TWDR - TWI Data register
.equ TWD0 = 0 ; TWI Data Register Bit 0
.equ TWD1 = 1 ; TWI Data Register Bit 1
.equ TWD2 = 2 ; TWI Data Register Bit 2
.equ TWD3 = 3 ; TWI Data Register Bit 3
.equ TWD4 = 4 ; TWI Data Register Bit 4
.equ TWD5 = 5 ; TWI Data Register Bit 5
.equ TWD6 = 6 ; TWI Data Register Bit 6
.equ TWD7 = 7 ; TWI Data Register Bit 7
; TWAR - TWI (Slave) Address register
.equ TWGCE = 0 ; TWI General Call Recognition Enable Bit
.equ TWA0 = 1 ; TWI (Slave) Address register Bit 0
.equ TWA1 = 2 ; TWI (Slave) Address register Bit 1
.equ TWA2 = 3 ; TWI (Slave) Address register Bit 2
.equ TWA3 = 4 ; TWI (Slave) Address register Bit 3
.equ TWA4 = 5 ; TWI (Slave) Address register Bit 4
.equ TWA5 = 6 ; TWI (Slave) Address register Bit 5
.equ TWA6 = 7 ; TWI (Slave) Address register Bit 6
; ***** TIMER_COUNTER_1 **************
; TIMSK1 - Timer/Counter Interrupt Mask Register
.equ TOIE1 = 0 ; Timer/Counter1 Overflow Interrupt Enable
.equ OCIE1A = 1 ; Timer/Counter1 Output CompareA Match Interrupt Enable
.equ OCIE1B = 2 ; Timer/Counter1 Output CompareB Match Interrupt Enable
.equ ICIE1 = 5 ; Timer/Counter1 Input Capture Interrupt Enable
; TIFR1 - Timer/Counter Interrupt Flag register
.equ TOV1 = 0 ; Timer/Counter1 Overflow Flag
.equ OCF1A = 1 ; Output Compare Flag 1A
.equ OCF1B = 2 ; Output Compare Flag 1B
.equ ICF1 = 5 ; Input Capture Flag 1
; TCCR1A - Timer/Counter1 Control Register A
.equ WGM10 = 0 ; Waveform Generation Mode
.equ WGM11 = 1 ; Waveform Generation Mode
.equ COM1B0 = 4 ; Compare Output Mode 1B, bit 0
.equ COM1B1 = 5 ; Compare Output Mode 1B, bit 1
.equ COM1A0 = 6 ; Comparet Ouput Mode 1A, bit 0
.equ COM1A1 = 7 ; Compare Output Mode 1A, bit 1
; TCCR1B - Timer/Counter1 Control Register B
.equ CS10 = 0 ; Prescaler source of Timer/Counter 1
.equ CS11 = 1 ; Prescaler source of Timer/Counter 1
.equ CS12 = 2 ; Prescaler source of Timer/Counter 1
.equ WGM12 = 3 ; Waveform Generation Mode
.equ WGM13 = 4 ; Waveform Generation Mode
.equ ICES1 = 6 ; Input Capture 1 Edge Select
.equ ICNC1 = 7 ; Input Capture 1 Noise Canceler
; TCCR1C - Timer/Counter1 Control Register C
.equ FOC1B = 6 ;
.equ FOC1A = 7 ;
; GTCCR - General Timer/Counter Control Register
.equ PSRSYNC = 0 ; Prescaler Reset Timer/Counter1 and Timer/Counter0
.equ TSM = 7 ; Timer/Counter Synchronization Mode
; ***** TIMER_COUNTER_2 **************
; TIMSK2 - Timer/Counter Interrupt Mask register
.equ TOIE2 = 0 ; Timer/Counter2 Overflow Interrupt Enable
.equ TOIE2A = TOIE2 ; For compatibility
.equ OCIE2A = 1 ; Timer/Counter2 Output Compare Match A Interrupt Enable
.equ OCIE2B = 2 ; Timer/Counter2 Output Compare Match B Interrupt Enable
; TIFR2 - Timer/Counter Interrupt Flag Register
.equ TOV2 = 0 ; Timer/Counter2 Overflow Flag
.equ OCF2A = 1 ; Output Compare Flag 2A
.equ OCF2B = 2 ; Output Compare Flag 2B
; TCCR2A - Timer/Counter2 Control Register A
.equ WGM20 = 0 ; Waveform Genration Mode
.equ WGM21 = 1 ; Waveform Genration Mode
.equ COM2B0 = 4 ; Compare Output Mode bit 0
.equ COM2B1 = 5 ; Compare Output Mode bit 1
.equ COM2A0 = 6 ; Compare Output Mode bit 1
.equ COM2A1 = 7 ; Compare Output Mode bit 1
; TCCR2B - Timer/Counter2 Control Register B
.equ CS20 = 0 ; Clock Select bit 0
.equ CS21 = 1 ; Clock Select bit 1
.equ CS22 = 2 ; Clock Select bit 2
.equ WGM22 = 3 ; Waveform Generation Mode
.equ FOC2B = 6 ; Force Output Compare B
.equ FOC2A = 7 ; Force Output Compare A
; TCNT2 - Timer/Counter2
.equ TCNT2_0 = 0 ; Timer/Counter 2 bit 0
.equ TCNT2_1 = 1 ; Timer/Counter 2 bit 1
.equ TCNT2_2 = 2 ; Timer/Counter 2 bit 2
.equ TCNT2_3 = 3 ; Timer/Counter 2 bit 3
.equ TCNT2_4 = 4 ; Timer/Counter 2 bit 4
.equ TCNT2_5 = 5 ; Timer/Counter 2 bit 5
.equ TCNT2_6 = 6 ; Timer/Counter 2 bit 6
.equ TCNT2_7 = 7 ; Timer/Counter 2 bit 7
; OCR2A - Timer/Counter2 Output Compare Register A
.equ OCR2A_0 = 0 ; Timer/Counter2 Output Compare Register Bit 0
.equ OCR2A_1 = 1 ; Timer/Counter2 Output Compare Register Bit 1
.equ OCR2A_2 = 2 ; Timer/Counter2 Output Compare Register Bit 2
.equ OCR2A_3 = 3 ; Timer/Counter2 Output Compare Register Bit 3
.equ OCR2A_4 = 4 ; Timer/Counter2 Output Compare Register Bit 4
.equ OCR2A_5 = 5 ; Timer/Counter2 Output Compare Register Bit 5
.equ OCR2A_6 = 6 ; Timer/Counter2 Output Compare Register Bit 6
.equ OCR2A_7 = 7 ; Timer/Counter2 Output Compare Register Bit 7
; OCR2B - Timer/Counter2 Output Compare Register B
.equ OCR2B_0 = 0 ; Timer/Counter2 Output Compare Register Bit 0
.equ OCR2B_1 = 1 ; Timer/Counter2 Output Compare Register Bit 1
.equ OCR2B_2 = 2 ; Timer/Counter2 Output Compare Register Bit 2
.equ OCR2B_3 = 3 ; Timer/Counter2 Output Compare Register Bit 3
.equ OCR2B_4 = 4 ; Timer/Counter2 Output Compare Register Bit 4
.equ OCR2B_5 = 5 ; Timer/Counter2 Output Compare Register Bit 5
.equ OCR2B_6 = 6 ; Timer/Counter2 Output Compare Register Bit 6
.equ OCR2B_7 = 7 ; Timer/Counter2 Output Compare Register Bit 7
; ASSR - Asynchronous Status Register
.equ TCR2BUB = 0 ; Timer/Counter Control Register2 Update Busy
.equ TCR2AUB = 1 ; Timer/Counter Control Register2 Update Busy
.equ OCR2BUB = 2 ; Output Compare Register 2 Update Busy
.equ OCR2AUB = 3 ; Output Compare Register2 Update Busy
.equ TCN2UB = 4 ; Timer/Counter2 Update Busy
.equ AS2 = 5 ; Asynchronous Timer/Counter2
.equ EXCLK = 6 ; Enable External Clock Input
; GTCCR - General Timer Counter Control register
.equ PSRASY = 1 ; Prescaler Reset Timer/Counter2
.equ PSR2 = PSRASY ; For compatibility
;.equ TSM = 7 ; Timer/Counter Synchronization Mode
; ***** AD_CONVERTER *****************
; ADMUX - The ADC multiplexer Selection Register
.equ MUX0 = 0 ; Analog Channel and Gain Selection Bits
.equ MUX1 = 1 ; Analog Channel and Gain Selection Bits
.equ MUX2 = 2 ; Analog Channel and Gain Selection Bits
.equ MUX3 = 3 ; Analog Channel and Gain Selection Bits
.equ ADLAR = 5 ; Left Adjust Result
.equ REFS0 = 6 ; Reference Selection Bit 0
.equ REFS1 = 7 ; Reference Selection Bit 1
; ADCSRA - The ADC Control and Status register A
.equ ADPS0 = 0 ; ADC Prescaler Select Bits
.equ ADPS1 = 1 ; ADC Prescaler Select Bits
.equ ADPS2 = 2 ; ADC Prescaler Select Bits
.equ ADIE = 3 ; ADC Interrupt Enable
.equ ADIF = 4 ; ADC Interrupt Flag
.equ ADATE = 5 ; ADC Auto Trigger Enable
.equ ADSC = 6 ; ADC Start Conversion
.equ ADEN = 7 ; ADC Enable
; ADCSRB - The ADC Control and Status register B
.equ ADTS0 = 0 ; ADC Auto Trigger Source bit 0
.equ ADTS1 = 1 ; ADC Auto Trigger Source bit 1
.equ ADTS2 = 2 ; ADC Auto Trigger Source bit 2
.equ ACME = 6 ;
; ADCH - ADC Data Register High Byte
.equ ADCH0 = 0 ; ADC Data Register High Byte Bit 0
.equ ADCH1 = 1 ; ADC Data Register High Byte Bit 1
.equ ADCH2 = 2 ; ADC Data Register High Byte Bit 2
.equ ADCH3 = 3 ; ADC Data Register High Byte Bit 3
.equ ADCH4 = 4 ; ADC Data Register High Byte Bit 4
.equ ADCH5 = 5 ; ADC Data Register High Byte Bit 5
.equ ADCH6 = 6 ; ADC Data Register High Byte Bit 6
.equ ADCH7 = 7 ; ADC Data Register High Byte Bit 7
; ADCL - ADC Data Register Low Byte
.equ ADCL0 = 0 ; ADC Data Register Low Byte Bit 0
.equ ADCL1 = 1 ; ADC Data Register Low Byte Bit 1
.equ ADCL2 = 2 ; ADC Data Register Low Byte Bit 2
.equ ADCL3 = 3 ; ADC Data Register Low Byte Bit 3
.equ ADCL4 = 4 ; ADC Data Register Low Byte Bit 4
.equ ADCL5 = 5 ; ADC Data Register Low Byte Bit 5
.equ ADCL6 = 6 ; ADC Data Register Low Byte Bit 6
.equ ADCL7 = 7 ; ADC Data Register Low Byte Bit 7
; DIDR0 - Digital Input Disable Register
.equ ADC0D = 0 ;
.equ ADC1D = 1 ;
.equ ADC2D = 2 ;
.equ ADC3D = 3 ;
.equ ADC4D = 4 ;
.equ ADC5D = 5 ;
; ***** ANALOG_COMPARATOR ************
; ACSR - Analog Comparator Control And Status Register
.equ ACIS0 = 0 ; Analog Comparator Interrupt Mode Select bit 0
.equ ACIS1 = 1 ; Analog Comparator Interrupt Mode Select bit 1
.equ ACIC = 2 ; Analog Comparator Input Capture Enable
.equ ACIE = 3 ; Analog Comparator Interrupt Enable
.equ ACI = 4 ; Analog Comparator Interrupt Flag
.equ ACO = 5 ; Analog Compare Output
.equ ACBG = 6 ; Analog Comparator Bandgap Select
.equ ACD = 7 ; Analog Comparator Disable
; DIDR1 - Digital Input Disable Register 1
.equ AIN0D = 0 ; AIN0 Digital Input Disable
.equ AIN1D = 1 ; AIN1 Digital Input Disable
; ***** PORTB ************************
; PORTB - Port B Data Register
.equ PORTB0 = 0 ; Port B Data Register bit 0
.equ PB0 = 0 ; For compatibility
.equ PORTB1 = 1 ; Port B Data Register bit 1
.equ PB1 = 1 ; For compatibility
.equ PORTB2 = 2 ; Port B Data Register bit 2
.equ PB2 = 2 ; For compatibility
.equ PORTB3 = 3 ; Port B Data Register bit 3
.equ PB3 = 3 ; For compatibility
.equ PORTB4 = 4 ; Port B Data Register bit 4
.equ PB4 = 4 ; For compatibility
.equ PORTB5 = 5 ; Port B Data Register bit 5
.equ PB5 = 5 ; For compatibility
.equ PORTB6 = 6 ; Port B Data Register bit 6
.equ PB6 = 6 ; For compatibility
.equ PORTB7 = 7 ; Port B Data Register bit 7
.equ PB7 = 7 ; For compatibility
; DDRB - Port B Data Direction Register
.equ DDB0 = 0 ; Port B Data Direction Register bit 0
.equ DDB1 = 1 ; Port B Data Direction Register bit 1
.equ DDB2 = 2 ; Port B Data Direction Register bit 2
.equ DDB3 = 3 ; Port B Data Direction Register bit 3
.equ DDB4 = 4 ; Port B Data Direction Register bit 4
.equ DDB5 = 5 ; Port B Data Direction Register bit 5
.equ DDB6 = 6 ; Port B Data Direction Register bit 6
.equ DDB7 = 7 ; Port B Data Direction Register bit 7
; PINB - Port B Input Pins
.equ PINB0 = 0 ; Port B Input Pins bit 0
.equ PINB1 = 1 ; Port B Input Pins bit 1
.equ PINB2 = 2 ; Port B Input Pins bit 2
.equ PINB3 = 3 ; Port B Input Pins bit 3
.equ PINB4 = 4 ; Port B Input Pins bit 4
.equ PINB5 = 5 ; Port B Input Pins bit 5
.equ PINB6 = 6 ; Port B Input Pins bit 6
.equ PINB7 = 7 ; Port B Input Pins bit 7
; ***** PORTC ************************
; PORTC - Port C Data Register
.equ PORTC0 = 0 ; Port C Data Register bit 0
.equ PC0 = 0 ; For compatibility
.equ PORTC1 = 1 ; Port C Data Register bit 1
.equ PC1 = 1 ; For compatibility
.equ PORTC2 = 2 ; Port C Data Register bit 2
.equ PC2 = 2 ; For compatibility
.equ PORTC3 = 3 ; Port C Data Register bit 3
.equ PC3 = 3 ; For compatibility
.equ PORTC4 = 4 ; Port C Data Register bit 4
.equ PC4 = 4 ; For compatibility
.equ PORTC5 = 5 ; Port C Data Register bit 5
.equ PC5 = 5 ; For compatibility
.equ PORTC6 = 6 ; Port C Data Register bit 6
.equ PC6 = 6 ; For compatibility
; DDRC - Port C Data Direction Register
.equ DDC0 = 0 ; Port C Data Direction Register bit 0
.equ DDC1 = 1 ; Port C Data Direction Register bit 1
.equ DDC2 = 2 ; Port C Data Direction Register bit 2
.equ DDC3 = 3 ; Port C Data Direction Register bit 3
.equ DDC4 = 4 ; Port C Data Direction Register bit 4
.equ DDC5 = 5 ; Port C Data Direction Register bit 5
.equ DDC6 = 6 ; Port C Data Direction Register bit 6
; PINC - Port C Input Pins
.equ PINC0 = 0 ; Port C Input Pins bit 0
.equ PINC1 = 1 ; Port C Input Pins bit 1
.equ PINC2 = 2 ; Port C Input Pins bit 2
.equ PINC3 = 3 ; Port C Input Pins bit 3
.equ PINC4 = 4 ; Port C Input Pins bit 4
.equ PINC5 = 5 ; Port C Input Pins bit 5
.equ PINC6 = 6 ; Port C Input Pins bit 6
; ***** PORTD ************************
; PORTD - Port D Data Register
.equ PORTD0 = 0 ; Port D Data Register bit 0
.equ PD0 = 0 ; For compatibility
.equ PORTD1 = 1 ; Port D Data Register bit 1
.equ PD1 = 1 ; For compatibility
.equ PORTD2 = 2 ; Port D Data Register bit 2
.equ PD2 = 2 ; For compatibility
.equ PORTD3 = 3 ; Port D Data Register bit 3
.equ PD3 = 3 ; For compatibility
.equ PORTD4 = 4 ; Port D Data Register bit 4
.equ PD4 = 4 ; For compatibility
.equ PORTD5 = 5 ; Port D Data Register bit 5
.equ PD5 = 5 ; For compatibility
.equ PORTD6 = 6 ; Port D Data Register bit 6
.equ PD6 = 6 ; For compatibility
.equ PORTD7 = 7 ; Port D Data Register bit 7
.equ PD7 = 7 ; For compatibility
; DDRD - Port D Data Direction Register
.equ DDD0 = 0 ; Port D Data Direction Register bit 0
.equ DDD1 = 1 ; Port D Data Direction Register bit 1
.equ DDD2 = 2 ; Port D Data Direction Register bit 2
.equ DDD3 = 3 ; Port D Data Direction Register bit 3
.equ DDD4 = 4 ; Port D Data Direction Register bit 4
.equ DDD5 = 5 ; Port D Data Direction Register bit 5
.equ DDD6 = 6 ; Port D Data Direction Register bit 6
.equ DDD7 = 7 ; Port D Data Direction Register bit 7
; PIND - Port D Input Pins
.equ PIND0 = 0 ; Port D Input Pins bit 0
.equ PIND1 = 1 ; Port D Input Pins bit 1
.equ PIND2 = 2 ; Port D Input Pins bit 2
.equ PIND3 = 3 ; Port D Input Pins bit 3
.equ PIND4 = 4 ; Port D Input Pins bit 4
.equ PIND5 = 5 ; Port D Input Pins bit 5
.equ PIND6 = 6 ; Port D Input Pins bit 6
.equ PIND7 = 7 ; Port D Input Pins bit 7
; ***** TIMER_COUNTER_0 **************
; TIMSK0 - Timer/Counter0 Interrupt Mask Register
.equ TOIE0 = 0 ; Timer/Counter0 Overflow Interrupt Enable
.equ OCIE0A = 1 ; Timer/Counter0 Output Compare Match A Interrupt Enable
.equ OCIE0B = 2 ; Timer/Counter0 Output Compare Match B Interrupt Enable
; TIFR0 - Timer/Counter0 Interrupt Flag register
.equ TOV0 = 0 ; Timer/Counter0 Overflow Flag
.equ OCF0A = 1 ; Timer/Counter0 Output Compare Flag 0A
.equ OCF0B = 2 ; Timer/Counter0 Output Compare Flag 0B
; TCCR0A - Timer/Counter Control Register A
.equ WGM00 = 0 ; Waveform Generation Mode
.equ WGM01 = 1 ; Waveform Generation Mode
.equ COM0B0 = 4 ; Compare Output Mode, Fast PWm
.equ COM0B1 = 5 ; Compare Output Mode, Fast PWm
.equ COM0A0 = 6 ; Compare Output Mode, Phase Correct PWM Mode
.equ COM0A1 = 7 ; Compare Output Mode, Phase Correct PWM Mode
; TCCR0B - Timer/Counter Control Register B
.equ CS00 = 0 ; Clock Select
.equ CS01 = 1 ; Clock Select
.equ CS02 = 2 ; Clock Select
.equ WGM02 = 3 ;
.equ FOC0B = 6 ; Force Output Compare B
.equ FOC0A = 7 ; Force Output Compare A
; TCNT0 - Timer/Counter0
.equ TCNT0_0 = 0 ;
.equ TCNT0_1 = 1 ;
.equ TCNT0_2 = 2 ;
.equ TCNT0_3 = 3 ;
.equ TCNT0_4 = 4 ;
.equ TCNT0_5 = 5 ;
.equ TCNT0_6 = 6 ;
.equ TCNT0_7 = 7 ;
; OCR0A - Timer/Counter0 Output Compare Register
.equ OCR0A_0 = 0 ;
.equ OCR0A_1 = 1 ;
.equ OCR0A_2 = 2 ;
.equ OCR0A_3 = 3 ;
.equ OCR0A_4 = 4 ;
.equ OCR0A_5 = 5 ;
.equ OCR0A_6 = 6 ;
.equ OCR0A_7 = 7 ;
; OCR0B - Timer/Counter0 Output Compare Register
.equ OCR0B_0 = 0 ;
.equ OCR0B_1 = 1 ;
.equ OCR0B_2 = 2 ;
.equ OCR0B_3 = 3 ;
.equ OCR0B_4 = 4 ;
.equ OCR0B_5 = 5 ;
.equ OCR0B_6 = 6 ;
.equ OCR0B_7 = 7 ;
; GTCCR - General Timer/Counter Control Register
;.equ PSRSYNC = 0 ; Prescaler Reset Timer/Counter1 and Timer/Counter0
.equ PSR10 = PSRSYNC ; For compatibility
;.equ TSM = 7 ; Timer/Counter Synchronization Mode
; ***** EXTERNAL_INTERRUPT ***********
; EICRA - External Interrupt Control Register
.equ ISC00 = 0 ; External Interrupt Sense Control 0 Bit 0
.equ ISC01 = 1 ; External Interrupt Sense Control 0 Bit 1
.equ ISC10 = 2 ; External Interrupt Sense Control 1 Bit 0
.equ ISC11 = 3 ; External Interrupt Sense Control 1 Bit 1
; EIMSK - External Interrupt Mask Register
.equ INT0 = 0 ; External Interrupt Request 0 Enable
.equ INT1 = 1 ; External Interrupt Request 1 Enable
; EIFR - External Interrupt Flag Register
.equ INTF0 = 0 ; External Interrupt Flag 0
.equ INTF1 = 1 ; External Interrupt Flag 1
; PCICR - Pin Change Interrupt Control Register
.equ PCIE0 = 0 ; Pin Change Interrupt Enable 0
.equ PCIE1 = 1 ; Pin Change Interrupt Enable 1
.equ PCIE2 = 2 ; Pin Change Interrupt Enable 2
; PCMSK2 - Pin Change Mask Register 2
.equ PCINT16 = 0 ; Pin Change Enable Mask 16
.equ PCINT17 = 1 ; Pin Change Enable Mask 17
.equ PCINT18 = 2 ; Pin Change Enable Mask 18
.equ PCINT19 = 3 ; Pin Change Enable Mask 19
.equ PCINT20 = 4 ; Pin Change Enable Mask 20
.equ PCINT21 = 5 ; Pin Change Enable Mask 21
.equ PCINT22 = 6 ; Pin Change Enable Mask 22
.equ PCINT23 = 7 ; Pin Change Enable Mask 23
; PCMSK1 - Pin Change Mask Register 1
.equ PCINT8 = 0 ; Pin Change Enable Mask 8
.equ PCINT9 = 1 ; Pin Change Enable Mask 9
.equ PCINT10 = 2 ; Pin Change Enable Mask 10
.equ PCINT11 = 3 ; Pin Change Enable Mask 11
.equ PCINT12 = 4 ; Pin Change Enable Mask 12
.equ PCINT13 = 5 ; Pin Change Enable Mask 13
.equ PCINT14 = 6 ; Pin Change Enable Mask 14
; PCMSK0 - Pin Change Mask Register 0
.equ PCINT0 = 0 ; Pin Change Enable Mask 0
.equ PCINT1 = 1 ; Pin Change Enable Mask 1
.equ PCINT2 = 2 ; Pin Change Enable Mask 2
.equ PCINT3 = 3 ; Pin Change Enable Mask 3
.equ PCINT4 = 4 ; Pin Change Enable Mask 4
.equ PCINT5 = 5 ; Pin Change Enable Mask 5
.equ PCINT6 = 6 ; Pin Change Enable Mask 6
.equ PCINT7 = 7 ; Pin Change Enable Mask 7
; PCIFR - Pin Change Interrupt Flag Register
.equ PCIF0 = 0 ; Pin Change Interrupt Flag 0
.equ PCIF1 = 1 ; Pin Change Interrupt Flag 1
.equ PCIF2 = 2 ; Pin Change Interrupt Flag 2
; ***** SPI **************************
; SPDR - SPI Data Register
.equ SPDR0 = 0 ; SPI Data Register bit 0
.equ SPDR1 = 1 ; SPI Data Register bit 1
.equ SPDR2 = 2 ; SPI Data Register bit 2
.equ SPDR3 = 3 ; SPI Data Register bit 3
.equ SPDR4 = 4 ; SPI Data Register bit 4
.equ SPDR5 = 5 ; SPI Data Register bit 5
.equ SPDR6 = 6 ; SPI Data Register bit 6
.equ SPDR7 = 7 ; SPI Data Register bit 7
; SPSR - SPI Status Register
.equ SPI2X = 0 ; Double SPI Speed Bit
.equ WCOL = 6 ; Write Collision Flag
.equ SPIF = 7 ; SPI Interrupt Flag
; SPCR - SPI Control Register
.equ SPR0 = 0 ; SPI Clock Rate Select 0
.equ SPR1 = 1 ; SPI Clock Rate Select 1
.equ CPHA = 2 ; Clock Phase
.equ CPOL = 3 ; Clock polarity
.equ MSTR = 4 ; Master/Slave Select
.equ DORD = 5 ; Data Order
.equ SPE = 6 ; SPI Enable
.equ SPIE = 7 ; SPI Interrupt Enable
; ***** WATCHDOG *********************
; WDTCSR - Watchdog Timer Control Register
.equ WDP0 = 0 ; Watch Dog Timer Prescaler bit 0
.equ WDP1 = 1 ; Watch Dog Timer Prescaler bit 1
.equ WDP2 = 2 ; Watch Dog Timer Prescaler bit 2
.equ WDE = 3 ; Watch Dog Enable
.equ WDCE = 4 ; Watchdog Change Enable
.equ WDP3 = 5 ; Watchdog Timer Prescaler Bit 3
.equ WDIE = 6 ; Watchdog Timeout Interrupt Enable
.equ WDIF = 7 ; Watchdog Timeout Interrupt Flag
; ***** CPU **************************
; SREG - Status Register
.equ SREG_C = 0 ; Carry Flag
.equ SREG_Z = 1 ; Zero Flag
.equ SREG_N = 2 ; Negative Flag
.equ SREG_V = 3 ; Two's Complement Overflow Flag
.equ SREG_S = 4 ; Sign Bit
.equ SREG_H = 5 ; Half Carry Flag
.equ SREG_T = 6 ; Bit Copy Storage
.equ SREG_I = 7 ; Global Interrupt Enable
; OSCCAL - Oscillator Calibration Value
.equ CAL0 = 0 ; Oscillator Calibration Value Bit0
.equ CAL1 = 1 ; Oscillator Calibration Value Bit1
.equ CAL2 = 2 ; Oscillator Calibration Value Bit2
.equ CAL3 = 3 ; Oscillator Calibration Value Bit3
.equ CAL4 = 4 ; Oscillator Calibration Value Bit4
.equ CAL5 = 5 ; Oscillator Calibration Value Bit5
.equ CAL6 = 6 ; Oscillator Calibration Value Bit6
.equ CAL7 = 7 ; Oscillator Calibration Value Bit7
; CLKPR - Clock Prescale Register
.equ CLKPS0 = 0 ; Clock Prescaler Select Bit 0
.equ CLKPS1 = 1 ; Clock Prescaler Select Bit 1
.equ CLKPS2 = 2 ; Clock Prescaler Select Bit 2
.equ CLKPS3 = 3 ; Clock Prescaler Select Bit 3
.equ CLKPCE = 7 ; Clock Prescaler Change Enable
; SPMCSR - Store Program Memory Control and Status Register
.equ SELFPRGEN = 0 ; Self Programming Enable
.equ PGERS = 1 ; Page Erase
.equ PGWRT = 2 ; Page Write
.equ BLBSET = 3 ; Boot Lock Bit Set
.equ RWWSRE = 4 ; Read-While-Write section read enable
.equ RWWSB = 6 ; Read-While-Write Section Busy
.equ SPMIE = 7 ; SPM Interrupt Enable
; MCUCR - MCU Control Register
.equ IVCE = 0 ;
.equ IVSEL = 1 ;
.equ PUD = 4 ;
.equ BODSE = 5 ; BOD Sleep Enable
.equ BODS = 6 ; BOD Sleep
; MCUSR - MCU Status Register
.equ PORF = 0 ; Power-on reset flag
.equ EXTRF = 1 ; External Reset Flag
.equ EXTREF = EXTRF ; For compatibility
.equ BORF = 2 ; Brown-out Reset Flag
.equ WDRF = 3 ; Watchdog Reset Flag
; SMCR - Sleep Mode Control Register
.equ SE = 0 ; Sleep Enable
.equ SM0 = 1 ; Sleep Mode Select Bit 0
.equ SM1 = 2 ; Sleep Mode Select Bit 1
.equ SM2 = 3 ; Sleep Mode Select Bit 2
; GPIOR2 - General Purpose I/O Register 2
.equ GPIOR20 = 0 ;
.equ GPIOR21 = 1 ;
.equ GPIOR22 = 2 ;
.equ GPIOR23 = 3 ;
.equ GPIOR24 = 4 ;
.equ GPIOR25 = 5 ;
.equ GPIOR26 = 6 ;
.equ GPIOR27 = 7 ;
; GPIOR1 - General Purpose I/O Register 1
.equ GPIOR10 = 0 ;
.equ GPIOR11 = 1 ;
.equ GPIOR12 = 2 ;
.equ GPIOR13 = 3 ;
.equ GPIOR14 = 4 ;
.equ GPIOR15 = 5 ;
.equ GPIOR16 = 6 ;
.equ GPIOR17 = 7 ;
; GPIOR0 - General Purpose I/O Register 0
.equ GPIOR00 = 0 ;
.equ GPIOR01 = 1 ;
.equ GPIOR02 = 2 ;
.equ GPIOR03 = 3 ;
.equ GPIOR04 = 4 ;
.equ GPIOR05 = 5 ;
.equ GPIOR06 = 6 ;
.equ GPIOR07 = 7 ;
; PRR - Power Reduction Register
.equ PRADC = 0 ; Power Reduction ADC
.equ PRUSART0 = 1 ; Power Reduction USART
.equ PRSPI = 2 ; Power Reduction Serial Peripheral Interface
.equ PRTIM1 = 3 ; Power Reduction Timer/Counter1
.equ PRTIM0 = 5 ; Power Reduction Timer/Counter0
.equ PRTIM2 = 6 ; Power Reduction Timer/Counter2
.equ PRTWI = 7 ; Power Reduction TWI
; ***** EEPROM ***********************
; EEARL - EEPROM Address Register Low Byte
.equ EEAR0 = 0 ; EEPROM Read/Write Access Bit 0
.equ EEAR1 = 1 ; EEPROM Read/Write Access Bit 1
.equ EEAR2 = 2 ; EEPROM Read/Write Access Bit 2
.equ EEAR3 = 3 ; EEPROM Read/Write Access Bit 3
.equ EEAR4 = 4 ; EEPROM Read/Write Access Bit 4
.equ EEAR5 = 5 ; EEPROM Read/Write Access Bit 5
.equ EEAR6 = 6 ; EEPROM Read/Write Access Bit 6
.equ EEAR7 = 7 ; EEPROM Read/Write Access Bit 7
; EEARH - EEPROM Address Register High Byte
.equ EEAR8 = 0 ; EEPROM Read/Write Access Bit 8
.equ EEAR9 = 1 ; EEPROM Read/Write Access Bit 9
; EEDR - EEPROM Data Register
.equ EEDR0 = 0 ; EEPROM Data Register bit 0
.equ EEDR1 = 1 ; EEPROM Data Register bit 1
.equ EEDR2 = 2 ; EEPROM Data Register bit 2
.equ EEDR3 = 3 ; EEPROM Data Register bit 3
.equ EEDR4 = 4 ; EEPROM Data Register bit 4
.equ EEDR5 = 5 ; EEPROM Data Register bit 5
.equ EEDR6 = 6 ; EEPROM Data Register bit 6
.equ EEDR7 = 7 ; EEPROM Data Register bit 7
; EECR - EEPROM Control Register
.equ EERE = 0 ; EEPROM Read Enable
.equ EEPE = 1 ; EEPROM Write Enable
.equ EEMPE = 2 ; EEPROM Master Write Enable
.equ EERIE = 3 ; EEPROM Ready Interrupt Enable
.equ EEPM0 = 4 ; EEPROM Programming Mode Bit 0
.equ EEPM1 = 5 ; EEPROM Programming Mode Bit 1
; ***** LOCKSBITS ********************************************************
.equ LB1 = 0 ; Lock bit
.equ LB2 = 1 ; Lock bit
.equ BLB01 = 2 ; Boot Lock bit
.equ BLB02 = 3 ; Boot Lock bit
.equ BLB11 = 4 ; Boot lock bit
.equ BLB12 = 5 ; Boot lock bit
; ***** FUSES ************************************************************
; LOW fuse bits
.equ CKSEL0 = 0 ; Select Clock Source
.equ CKSEL1 = 1 ; Select Clock Source
.equ CKSEL2 = 2 ; Select Clock Source
.equ CKSEL3 = 3 ; Select Clock Source
.equ SUT0 = 4 ; Select start-up time
.equ SUT1 = 5 ; Select start-up time
.equ CKOUT = 6 ; Clock output
.equ CKDIV8 = 7 ; Divide clock by 8
; HIGH fuse bits
.equ BOOTRST = 0 ; Select reset vector
.equ BOOTSZ0 = 1 ; Select boot size
.equ BOOTSZ1 = 2 ; Select boot size
.equ EESAVE = 3 ; EEPROM memory is preserved through chip erase
.equ WDTON = 4 ; Watchdog Timer Always On
.equ SPIEN = 5 ; Enable Serial programming and Data Downloading
.equ DWEN = 6 ; debugWIRE Enable
.equ RSTDISBL = 7 ; External reset disable
; EXTENDED fuse bits
.equ BODLEVEL0 = 0 ; Brown-out Detector trigger level
.equ BODLEVEL1 = 1 ; Brown-out Detector trigger level
.equ BODLEVEL2 = 2 ; Brown-out Detector trigger level
; ***** CPU REGISTER DEFINITIONS *****************************************
.def XH = r27
.def XL = r26
.def YH = r29
.def YL = r28
.def ZH = r31
.def ZL = r30
; ***** DATA MEMORY DECLARATIONS *****************************************
.equ FLASHEND = 0x3fff ; Note: Word address
.equ IOEND = 0x00ff
.equ SRAM_START = 0x0100
.equ SRAM_SIZE = 2048
.equ RAMEND = 0x08ff
.equ XRAMEND = 0x0000
.equ E2END = 0x03ff
.equ EEPROMEND = 0x03ff
.equ EEADRBITS = 10
#pragma AVRPART MEMORY PROG_FLASH 32768
#pragma AVRPART MEMORY EEPROM 1024
#pragma AVRPART MEMORY INT_SRAM SIZE 2048
#pragma AVRPART MEMORY INT_SRAM START_ADDR 0x100
; ***** BOOTLOADER DECLARATIONS ******************************************
.equ NRWW_START_ADDR = 0x3800
.equ NRWW_STOP_ADDR = 0x3fff
.equ RWW_START_ADDR = 0x0
.equ RWW_STOP_ADDR = 0x37ff
.equ PAGESIZE = 64
.equ FIRSTBOOTSTART = 0x3f00
.equ SECONDBOOTSTART = 0x3e00
.equ THIRDBOOTSTART = 0x3c00
.equ FOURTHBOOTSTART = 0x3800
.equ SMALLBOOTSTART = FIRSTBOOTSTART
.equ LARGEBOOTSTART = FOURTHBOOTSTART
; ***** INTERRUPT VECTORS ************************************************
.equ INT0addr = 0x0002 ; External Interrupt Request 0
.equ INT1addr = 0x0004 ; External Interrupt Request 1
.equ PCI0addr = 0x0006 ; Pin Change Interrupt Request 0
.equ PCI1addr = 0x0008 ; Pin Change Interrupt Request 0
.equ PCI2addr = 0x000a ; Pin Change Interrupt Request 1
.equ WDTaddr = 0x000c ; Watchdog Time-out Interrupt
.equ OC2Aaddr = 0x000e ; Timer/Counter2 Compare Match A
.equ OC2Baddr = 0x0010 ; Timer/Counter2 Compare Match A
.equ OVF2addr = 0x0012 ; Timer/Counter2 Overflow
.equ ICP1addr = 0x0014 ; Timer/Counter1 Capture Event
.equ OC1Aaddr = 0x0016 ; Timer/Counter1 Compare Match A
.equ OC1Baddr = 0x0018 ; Timer/Counter1 Compare Match B
.equ OVF1addr = 0x001a ; Timer/Counter1 Overflow
.equ OC0Aaddr = 0x001c ; TimerCounter0 Compare Match A
.equ OC0Baddr = 0x001e ; TimerCounter0 Compare Match B
.equ OVF0addr = 0x0020 ; Timer/Couner0 Overflow
.equ SPIaddr = 0x0022 ; SPI Serial Transfer Complete
.equ URXCaddr = 0x0024 ; USART Rx Complete
.equ UDREaddr = 0x0026 ; USART, Data Register Empty
.equ UTXCaddr = 0x0028 ; USART Tx Complete
.equ ADCCaddr = 0x002a ; ADC Conversion Complete
.equ ERDYaddr = 0x002c ; EEPROM Ready
.equ ACIaddr = 0x002e ; Analog Comparator
.equ TWIaddr = 0x0030 ; Two-wire Serial Interface
.equ SPMRaddr = 0x0032 ; Store Program Memory Read
.equ INT_VECTORS_SIZE = 52 ; size in words
#endif /* _M328PDEF_INC_ */
; ***** END OF FILE ******************************************************Файл m328Pdef.inc