Двигатель постоянного тока — это электрическая машина, преобразующая электрическую энергию постоянного тока в механическую энергию.
Оборудование и пособия:
Электрический двигатель постоянного тока 3—5 Вольт.
- Колесо
- Плата Arduino Uno
- Модуль
- Транзистор
- Светодиоды красные
- Резистор
- Кнопка электрическая.
- Батарея питания 4,5 Вольт.
Электрический мотор состоит из неподвижной части – статора, который служит для возбуждения главного магнитного поля машины, и вращающейся части – якоря (ротора).

Рис. 1.
Электрические машины обратимы. Это значит, что одна и та же машина может работать и как генератор, и как двигатель. Поэтому можно говорить об устройстве машин постоянного тока, не рассматривая отдельно устройство генератора или двигателя.
Свойство обратимости не следует противопоставлять определенному назначению машины, которая обычно проектируется и используется либо как двигатель, либо как генератор.
Рис. 2.
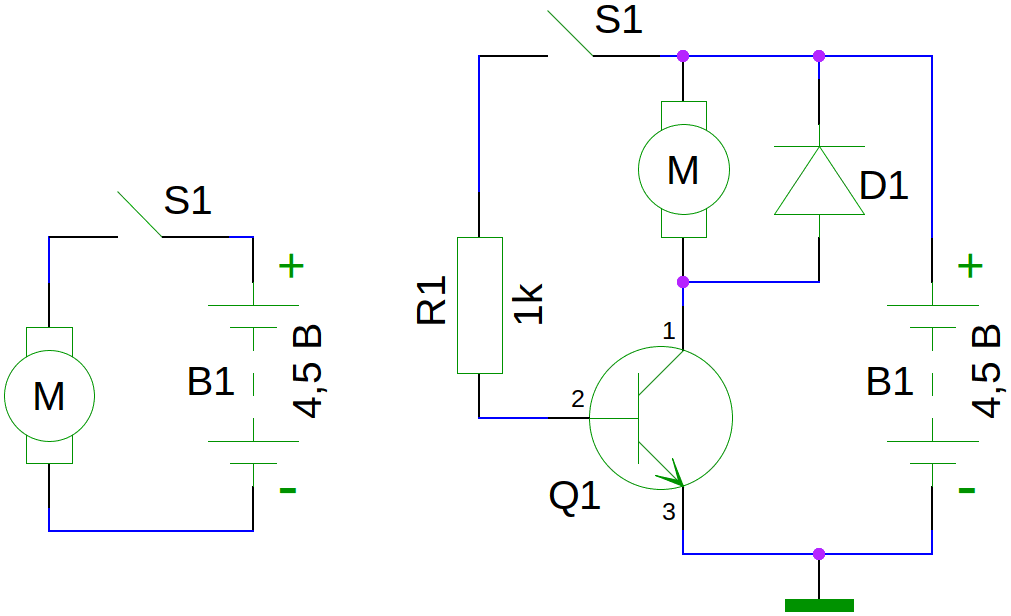
Рис. 2.
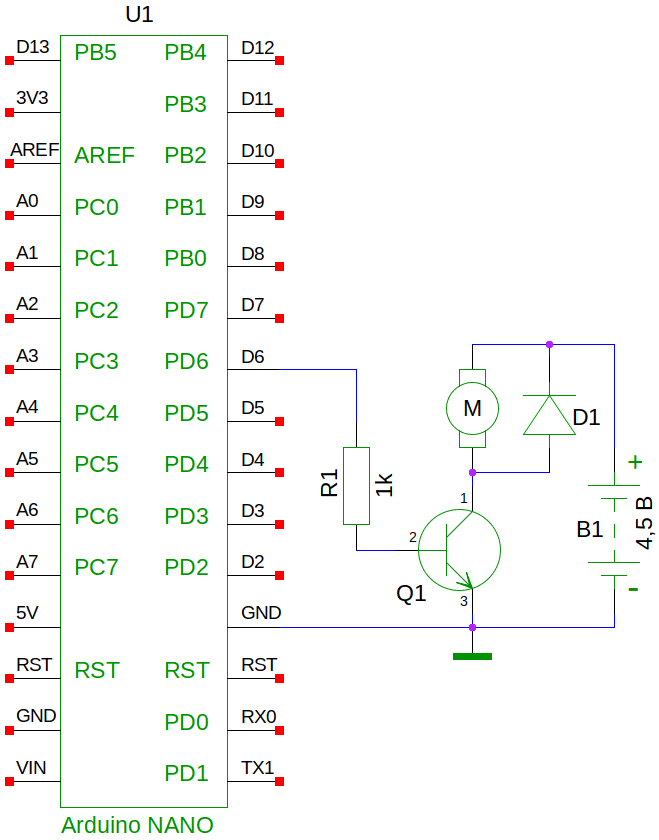
Рис. 3.
int motor = 6;
void setup() {
pinMode(6, OUTPUT);
}
void loop() {
digitalWrite(motor, HIGH);
delay(1000);
digitalWrite(motor, LOW);
delay(2000);
}Лист. 1. Программа
int motor = 6;
void setup() {
pinMode(6, OUTPUT);
}
void loop() {
analogWrite(motor, 50);
delay(1000);
analogWrite(motor, 200);
delay(1000);
}Лист. 2. Программа

Рис. 4.
int ldp = 4; // Left direction pin
int rdp = 7; // Right direction pin
int lsp = 5; // Left speed pin
int rsp = 6; // Right speed pin
void setup() {
pinMode(ldp, OUTPUT);
delay(1000);
}
void loop() {
digitalWrite(ldp, HIGH);
analogWrite(lsp, 250);
delay(2000);
analogWrite(lsp, 0);
delay(1000);
digitalWrite(ldp, LOW);
analogWrite(lsp, 250);
delay(2000);
analogWrite(lsp, 0);
delay(1000);
}
Лист. 3. Программа
Пп
Прог. 2.
Задание 1. Допишите код программы
Задание 2. Напишите программы движения робота по траектории овал, прямоугольник, восьмёрка.